
Ortsanzeige durch Laserpunktausrichtung
in einem Globus
- Die Hardware -
Der Globus
Der Globus ist ein doppelwandiger Globus, welcher in anderen Farben erscheint, wenn er von innen beleuchtet wird.
Für meine Verwendung allerdings wurde die Innenbeleuchtung ausgebaut.
Laut Herstellerangaben bemisst der Globus einen Durchmesser von 30 cm.

Als Laser verwendete ich einen üblichen Laserpointer samt Innenbeschaltung. Versorgt wurde dieser mit der vom Foxboard erzeugten Spannung VCC (3,3V)
Daten: Max Output 1W, Laser Klasse 2, Wellenlänge 650nm.
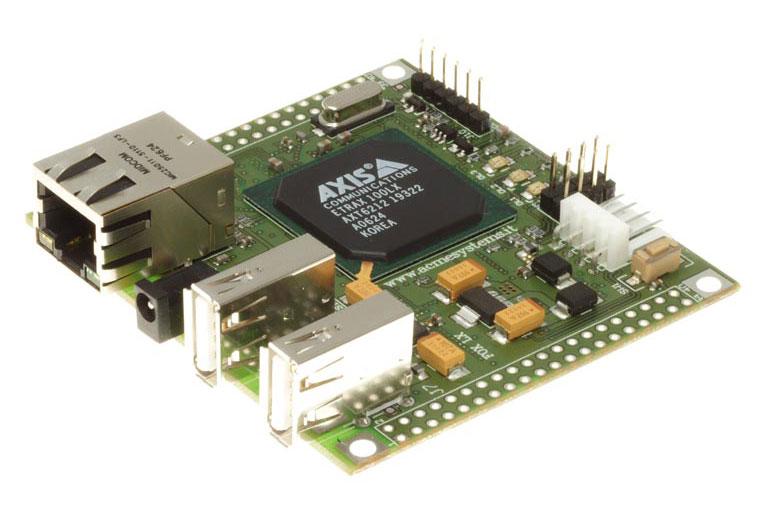
Das
Foxboard ist ein kleines Linux-Komplettsystem. Da in der Hardware das
Linux-System schon integriert ist, spricht man hier von einem
Embedded System.
Kern
des Foxboards ist der hochintegrierte ETRAX 100LX Controller
der schwedischen Firma AXIS Communications. Dieser Chip
enthält eine
mit 100MHz betriebene
32 Bit RISC CPU mit einem 10/100 Mbps
Ethernet Controller und einer großen Anzahl an
I/O-Schnittstellen.
Es verfügt über 8MB Flashspeicher, 32MB SDRAM und diverse Ports. Als Betriebspannung benötigt es eine stabilisierte 5V Spannungsversorgung.

Um die Ausrichtungseinheiten (Schrittmotoren) anzusteuern wählte ich den Treiber-Baustein A3979 von Allegro. Dieser wurde passend zu meinen Schrittmotoren angeboten und konnte gleichzeitig für Leistung und Logik genutzt werden. Der A3979 ist ein SMD-Baustein mit 28 Pins und einer Wärmeableitungsfläche an der Unterseite. Er ist für Motorspannungen bis 35 Volt und bis zu 2.5 A geeignet. Dieser IC lässt sich im 1-Schritt, ½-Schritt, ¼ und 1/16 Schritt betreiben. Die Auswahl erfolgt über die Pins MS1 und MS2.
Er ist mit folgenden Sicherheitsfunktionen ausgestattet: integrierter Überstromschutz, Unter-Spannungserkennung und Crossover-current Protection.
Außerdem verfügt der A3979 über einen Logik-Eingang STEP und DIR. Mit DIR wird die Richtung angegeben, in welcher sich der Rotor drehen soll und mit STEP wird je Impuls ein Schritt weiter gedreht.
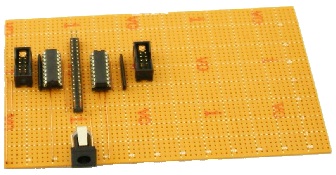
Um letztendlich die Schrittmotoren damit anzusteuern ist eine äußere Beschaltung notwendig. Deshalb wurden zwei Platinen entwickelt die diese Aufgabe übernehmen.
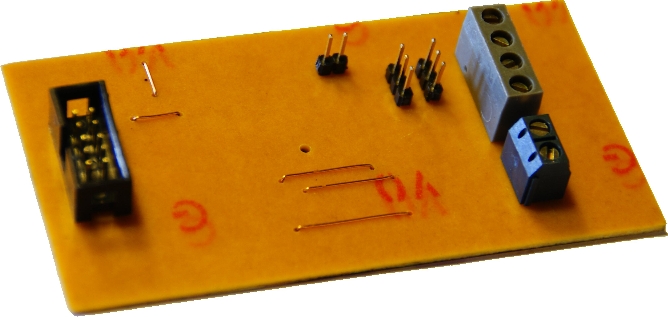
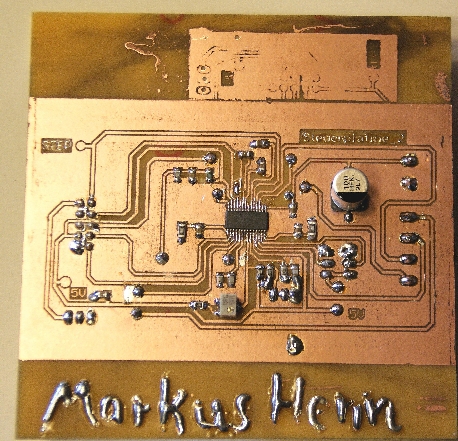
Steuerplatine 1 zur Ansteuerung des Schrittmotors, welcher den Globus dreht Steuerplatine 2 zur positionierung und zum Anschluss des Lasers.



Die Idee - Hardware - Übersicht der Komponenten - Mechanik - Vorgehensweise - Video - Start